Напряжение питания для инфракрасного дальномера sharp. Курс Arduino - Дальномеры. Основные технические характеристики
В данной статье рассмотрим подключение и работу с ИК-датчиком измерения расстояния SHARP GP2Y0A02YK0F.
В отличие от того же , данный датчик имеет гораздо более скромный диапазон измерений, но все равно обладает рядом полезных отличительных свойств. Например, данный датчик позволяет измерять расстояние даже через прозрачные поверхности (правда, теряя точность показаний, но все же).
Подключение датчика:
GND на любой из GND пинов--- ардуино
OUT на любой из аналоговых входов ардуино (в примерах подсоединено к A0)
VCC на + 5 вольт на ардуино
Основные технические характеристики:
Диапазон измерения расстояния: от 20 до 150 см
Аналоговый выход
Размеры: 29.5x13x21.6 мм
Потребление тока: 33 мА
Напряжение питания: от 4.5 до 5.5 В
Её необходимо распаковать и добавить в папку "libraries" в папке с Arduino IDE. Не забывайте перезагрузить среду, если на момент добавления IDEшка была открыта.
В чем особенность данной библиотеки и почему именно её рекомендуем к использованию? Ответ прост и кроется в принципе её работы. Для измерения расстояния используется множество замеров, из которых отбрасываются ошибочные, которые сильно отличаются от соседних. По утверждениям авторов - 12% всех показаний вносят 42% ошибки в итоговое значение расстояния, если не отбрасывать ошибочные измерения.
Перейдем к программному коду - примеру работы с датчиком (пример подойдет также для датчика GP2Y0A21Y, в коде необходимо будет изменить значение model на 1080):
Пример программного кода
#include
Дальномеры
В этом уроке мы поподробнее познакомимся с дальномерами.
Ультразвуковой дальномер HC-SR04
На сегодняшний день (2016 г) стоит не более 1$ на AliExpress .
Датчик имеет 4 вывода:
- Vcc – На этот контакт подается питание в 5В.
- Trig – На этот контакт нужно подать логическую единицу на 10мкс, чтобы дальномер испустил ультразвуковую волну.
- Echo – После того, как ультразвуковая волна вернется обратно, на этот контакт будет подана логическая единица на время, пропорциональное расстоянию до объекта
- Gnd – Этот контакт подключается к земле.
Ультразвуковой дальномер – работает по принципу “летучей мыши”. Он посылает ультразвуковую волну и считает время, за которое волна возвратится. Зная скорость звука и время, за которое волна пришла обратно, можно рассчитать расстояние до объекта.
С помощью этого дальномера мы соберем небольшой парктроник, который можно будет увеличить и собрать готовое устройство для парковки автомобиля. Еще я покажу, как можно использовать дальномер для управления своими устройствами.
Дальномер
Давайте соберем простенькую схему для того чтобы понять, как работает дальномер.

Код
#define ECHO 13 #define TRIG 12 void setup() { pinMode(ECHO, INPUT); // На ECHO нужно подать логическую единицу pinMode(TRIG, OUTPUT); //С TRIG мы будем считывать значение расстояния Serial.begin(9600); //Установим соединение с Serial портом } void loop() { //Подаем на TRIG HIGH и сразу LOW digitalWrite(TRIG, HIGH); digitalWrite(TRIG, LOW); //Считываем длину пришедшего сигнала в микросекундах int dist = pulseIn(ECHO, HIGH) / 54; // Делим на 54, чтобы перевести показания в см Serial.println(dist); //Выводим показания дальномера в Serial delay(300); //Ждем немного, чтобы глаз успевал различать показания }
Пояснения
pulseIn(ECHO, HIGH); - С помощью этой функции мы считали время, на которое на пине ECHO устанавливается значение HIGH. Это время считается в микросекундах.
В общем виде pulseIn(); можно записать так:
pulseIn(пин, значение, таймаут);
Пин – Пин, на котором будет производиться подсчет времени.
Значение – Уровень ожидаемого сигнала, при котором будет проводиться подсчет. HIGH или LOW.
Таймаут – время в микросекундах, в течение которого ожидается приход сигнала. По истечении таймаута значение, возвращаемое функцией, будет приравнено к нулю.
Так, с принципом работы дальномера разобрались. Время сделать парктроник для игрушечных машинок.
Парктроник
Схема парктроника выглядит так:

#define ECHO 3 // Прием сигнала с дальномера #define TRIG 2 // Подача сигнала на дальномер #define COUNT 5 // Кол-во светодиодов #define BUZZ 6 // Пин для пищалки #define FIRST 9 // Первый пин светодиодов #define dist_setup 1 //Подстроечный коэффициент #define frequency 5000 void setup() { for(int i = 0; i < COUNT; ++i) //Обозначаем светодиоды как выход... { pinMode(i+FIRST, OUTPUT); } pinMode(ECHO, INPUT); //...ECHO как вход... pinMode(TRIG, OUTPUT); //...TRIG как выход... pinMode(BUZZ, OUTPUT); //...пищалку как выход Serial.begin(9600); //Установим соединение с Serial } void loop() { digitalWrite(TRIG, HIGH); //Подаем команду на дальномер digitalWrite(TRIG, LOW); int dist = pulseIn(ECHO, HIGH) / 54; //Измеряем расстояние до объекта dist = constrain(dist, 2, 60); //Полученные значения загоняем в диапазон от 2 до 60 //Сравниваем полученные показания и включаем нужный режим if (dist < 10) { all_led_on(); } else if (dist < 20 * dist_setup) { four_led_on(); } else if (dist < 30 * dist_setup) { three_led_on(); } else if(dist < 40 * dist_setup) { two_led_on(); } else if(dist < 50 * dist_setup) { one_led_on(); } else { for(int i = 0; i < COUNT; ++i) { digitalWrite(i+FIRST, LOW); } noTone(BUZZ); } } // Описание режимов void one_led_on() { digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, LOW); digitalWrite(13, HIGH); tone (BUZZ, frequency, 1000); delay(1000); } void two_led_on() { digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, LOW); digitalWrite(12, HIGH); digitalWrite(13, HIGH); tone(BUZZ, frequency, 700); delay(700); } void three_led_on() { digitalWrite(9, LOW); digitalWrite(10, LOW); digitalWrite(11, HIGH); digitalWrite(12, HIGH); digitalWrite(13, HIGH); tone(BUZZ, frequency, 400); delay(400); } void four_led_on() { digitalWrite(9, LOW); digitalWrite(10, HIGH); digitalWrite(11, HIGH); digitalWrite(12, HIGH); digitalWrite(13, HIGH); tone(BUZZ, frequency, 200); delay(200); } void all_led_on() { for(int i = 0; i < COUNT; ++i) { digitalWrite(i+FIRST, HIGH); } tone(BUZZ, frequency, 5000); delay(5000); }
Пояснения
Парктроник снабжен светодиодной и звуковой индикацией. При приближении объекта на заданные расстояния раздаются более частые сигналы, и загорается больше светодиодов.
dist_ setup – это коэффициент, с помощью которого можно регулировать расстояние до срабатывания парктроника.
У меня он равен единице. Если вам нужно уменьшить расстояние – нужно уменьшить коэффициент, но тогда он будет в виде 0.xxx. Для этого вводится переменная типа float.
Частоту писка можно также изменять. Для этого нужно изменить значение frequency . Но следует помнить, что пищит пьезоизлучатель ужасно. Крайне. И, мне кажется, что он быстро отобьет у вас желание им пользоваться дальше или дольше 5 минут.
Как вариант – понизить частоту до 20 Гц или подключить обычный динамик на 8 Ом, к примеру.
Пароль
Теперь попробуем сделать секретный шифр, который зажигает светодиоды. А если в схему включить сервомотор с задвижкой, то можно сделать замок на дверь или ящичек с паролем.
Внимание на схему.

Код
//Пины первого дальномера #define TRIG1 12 #define ECHO1 13 //Пины второго дальномера #define TRIG2 10 #define ECHO2 11 //Светодиоды #define FIRST 3 #define COUNT 5 //Кнопка сброса #define RESET 2 //Переменные для пароля int key1; int key2; int key3; void setup() { //Обозначение светодиодов как выход for(int i = 0; i < COUNT; i++) { pinMode(i+FIRST, OUTPUT); } //Обозначение пинов на дальномерах pinMode(TRIG1, OUTPUT); pinMode(ECHO1, INPUT); pinMode(TRIG2, OUTPUT); pinMode(ECHO2, INPUT); pinMode(RESET, INPUT_PULLUP); } void loop() { //Подача сигнала на дальномеры digitalWrite(TRIG2, HIGH); digitalWrite(TRIG2, LOW); int dist2 = pulseIn(ECHO2, HIGH,3000) / 54; digitalWrite(TRIG1, HIGH); digitalWrite(TRIG1, LOW); int dist1 = pulseIn(ECHO1, HIGH) / 54; //Дополнительная индикация "ввода" символов if(dist1 < 10 && dist2 < 10) { digitalWrite(5, HIGH); delay(100); } if(dist2 > 20 && dist2 < 25) { digitalWrite(4, HIGH); delay(100); } if(dist1 > 20 && dist1 < 25) { digitalWrite(6, HIGH); delay(100); } //Код пароля + индикация "ввода" символов if(dist2 > 10 && dist2 <15) { key1 = 1; digitalWrite(3, HIGH); delay(100); } if(dist1 > 10 && dist1 < 15) { digitalWrite(7, HIGH); delay(100); key1 = 0; } if(dist1 > 20 && dist1 < 25 && key1 == 1) { key2 = 1; } else if(dist2 > 20 && dist2 <25 || key1 == 0) { key1 = 0; key2 = 0; } if(dist1 < 10 && dist2 < 10 && key2 == 1) { key3 = 1; } if(key3 == 1) { for(int i = 0; i < COUNT; i++) { digitalWrite(i + FIRST, HIGH); } } if(key3 == 0) { for(int i = 0; i < COUNT; i++) { digitalWrite(i + FIRST, LOW); } } //Сброс пароля boolean res = digitalRead(RESET); if(res == 0) { key1 = 0; key2 = 0; key3 = 0; } }
Пояснения
Для того чтобы зажечь все пять светодиодов – нужно знать последовательность действий, которую нужно выполнять. Вот для вас задание – “Не смотря объяснения ниже, определить, какую же последовательность действий нужно выполнять, чтобы загорелись все пять светодиодов”
Это выполнимая задача, если вы читали первую часть курса и разобрались в работе функции if().
Разобрались? Если да – молодцы, а если нет – почти молодцы.
Всего есть три “символа ввода” – от 0 до 10, от 10 до 15 и от 20 до 25.
Состояние от 0 до 10 включается, если поднести обе руки на расстояние от 0 до 10 см к обоим дальномерам. Если это сделать – загорится желтый светодиод.
Состояние от 10 до 15 включится, когда вы поднесете руку к правому или левому дальномеру на расстояние от 10 до 15 см. О совершении этого действия вам подскажут крайний левый светодиод для левой руки и крайний правый – для правой.
Состояние от 20 до 25 включается в тот момент, когда расстояние от руки до одного из дальномеров будет от 20 до 25 см. Об этом вас проинформируют второй слева и второй справа светодиоды для левой и правой руки соответственно.
Стоит отметить, что выполнять последовательность нужно строго.
- Поднести ПРАВУЮ руку на расстояние от 10 до 15.
- После того, как загорелся крайний правый светодиод – поднести ЛЕВУЮ руку на расстояние от 20 до 25. Все это делается, не меняя положения правой руки.
- После индикации второго слева светодиода – отвести ЛЕВУЮ руку влево, чтобы не загорелся крайний левый светодиод, иначе – код нужно будет набирать сначала. ПРАВУЮ руку приблизить на расстояние от 0 до 10, а ЛЕВУЮ подвести на это же расстояние, не задевая расстояние от 10 до 15
- Светодиоды должны гореть и не реагировать на ваши действия.
- Нажать кнопку RESET, для сброса пароля. Светодиоды должны потухнуть.
Каждое неверное движение сбрасывает пароль, и его нужно вводить заново. С первого раза может и не получиться, но спустя несколько минут тренировки, я уверен – все получится, и светодиоды загорятся.
После того, как у вас будет получаться зажечь все светодиоды, можно вам проверить себя и изменить код так, чтобы последовательность была другая – на ваше усмотрение. Можно сделать больше “символов”, а можно оставить те же, но сделать каждый символ с использованием двух дальномеров. Это будет заданием для самостоятельного решения.
Инфракрасный дальномер Sharp

С этими дальномерами все даже проще. Подключать их нужно, как и все аналоговые датчики. И даже можно без резистора на 10 кОм. Если вы по каким-то причинам этого не умеете, то это описано в моей статье про .
Терменвокс
Есть такой музыкальный инструмент, как терменвокс. И сейчас мы соберем подобие этого инструмента.

Код
// Обозначаем дальномер, кнопку и пищалку #define RFIND A5 #define BUT 9 #define BUZ 8 // Логические переменные для кнопки bool sound_on = false; bool but_up = true; void setup() { pinMode(RFIND, INPUT); pinMode(BUZ, OUTPUT); pinMode(BUT,INPUT_PULLUP); } void loop() { //Код для включения и выключения терменвокса bool but_now = digitalRead(BUT); if(but_up && !but_now) { delay(10); bool but_now = digitalRead(BUT); if(!but_now) { sound_on = !sound_on; } } but_up = but_now; //Код для терменвокса if(sound_on == 1) { int val, freq; val = analogRead(RFIND); //Со значениями constrain и map можно поиграть, как душе угодно val = constrain(val, 100, 400); freq = map(val, 100, 400, 1000, 2500); tone(BUZ, freq, 20); } }
Пояснения
Если нажать кнопку, то из пищалки или динамика, смотря, что вы подключили, раздастся сигнал, который будет варьироваться в соответствии с расстоянием от дальномера до вашей руки.
Кнопка нужна для остановки или запуска нашего “Терменвокса”
Итог
Сегодня мы поближе познакомились с дальномерами и провели несколько небольших экспериментов, два из которых можно использовать в реальной жизни. Парктроник – помог бы припарковаться, а Кодовый замок можно усовершенствовать таким образом, что при вводе правильного пароля, сервомотор открывает защелку на двери в вашу комнату, например.
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот | |
|---|---|---|---|---|---|---|---|
| Схема 1 | |||||||
| Плата Arduino | Arduino Uno | 1 | В блокнот | ||||
| Макетная плата | Breadboard-half | 1 | В блокнот | ||||
| Соединительные провода | "Папа-Папа" | 4 | В блокнот | ||||
| Дальномер | HC-SR04 | 2 | В блокнот | ||||
| Схема 2 | |||||||
| Плата Arduino | Arduino Uno | 1 | В блокнот | ||||
| Дальномер | HC-SR04 | 1 | В блокнот | ||||
| Соединительные провода | "Папа-Папа" | 15 | В блокнот | ||||
| Макетная плата | Breadboard-half | 1 | В блокнот | ||||
| Пьезоизлучатель | 1 | В блокнот | |||||
| Резистор | 220 Ом | 1 | В блокнот | ||||
| Светодиод | АЛ102Б | 2 | В блокнот | ||||
| Светодиод | АЛ307В | 1 | В блокнот | ||||
| Светодиод | АЛ307Д | 2 | В блокнот | ||||
| Схема 3 | |||||||
| Плата Arduino | Arduino Uno | 1 | В блокнот | ||||
| Дальномер | HC-SR04 | 2 | В блокнот | ||||
| Резистор | 220 Ом | 5 | |||||
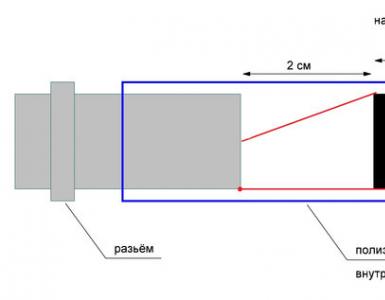
В датчиках Sharp установлен инфракрасный (IR) светодиод (LED) с линзой, который излучает узкий световой луч. Отраженный от объекта луч направляется через другую линзу на позиционно-чувствительный фотоэлемент (Position-Sensitive Detector, PSD). От местоположения падающего на PSD луча зависит его проводимость. Проводимость преобразуется в напряжение и, к примеру, оцифровывая его аналого-цифровым преобразователем микроконтроллера, можно вычислить расстояние.

Выход инфракрасного датчика расстояния Sharp обратно пропорциональный - с увеличением расстояния его значение медленно уменьшается. Вид графика зависимости между расстоянием и напряжением.

Датчики, в зависимости от их типа, имеют границы измерения, в пределах которых их выход может быть признан надежным. Измерение максимального реального расстояния ограничивают два фактора: уменьшение интенсивности отраженного света и невозможность PSD регистрировать незначительные изменения местоположения отображенного луча. В целом график зависимости между расстоянием и напряжением не является линейным, однако в пределах допустимых расстояний график обратной величины выходного напряжения и расстояния к линейности приближается достаточно близко, и с его помощью довольно просто получить формулу для преобразования напряжения в расстояние. Для нахождения такой формулы необходимо точки этого графика ввести в какую-либо программу обработки табличных данных и из них создать новый график. В программе обработки табличных данных на основе точек графика возможно автоматически вычислить линию тренда. Например, для датчика GP2Y0A021YK0F:

Технические характеристики инфракрасного дальномера Sharp
Рабочее напряжение: 4,5 - 5,5 В; Максимальный потребляемый ток: 40 мА (типичный - 30 мА); Тип выходного сигнала: аналоговый; Дифференциальное напряжение, большее диапазона распознавания расстояния: 2,0 В; Время отклика: 38 ± 10 мс Диапазон работы: Датчик GP2Y0A41SK0F: 4 - 30 см; Датчик GP2Y0A021YK0F: 10 см - 80 см; Датчик GP2Y0A02YK0F: 20 см - 150 см;Пример использования
Создадим пример подсчета посетителей магазина. Упростим задачу, предполагая, что вход осуществляется через неширокую дверь, и для входа и выхода разные двери. На входе ставим инфракрасный дальномер Sharp GP2Y0A21YK0F (20-150 cм) таким образом, чтобы при прохождении человека показания имели значения 10 – 50 см, при отсутствии людей 80 см. При обнаружении посетителя увеличиваем счетчик подсчета посетителей. Данные выводим на графический дисплей Nokia 5110. Для отображения информации с датчиков будем использовать ЖК-дисплей Nokia 5110. Это графический монохромный дисплей с разрешением 84×48 точек. Дисплей Nokia 5110 поставляется на плате в паре с контроллером PCD8544 и штыревым разъемом. Электропотребление дисплея позволяет питать его от выхода +3.3 В платы Arduino.Для проекта нам понадобятся следующие детали:
плата Arduino Uno
макетная плата (Breadboard Half)
инфракрасный датчик расстояния sharp GP2Y0A21YK0F
дисплей Nokia 5110
соединительные провода
Соберем схему, показанную на рисунке.

Запустим Arduino IDE. Создадим новый скетч и внесем в него следующее содержимое: //Инфракрасный датчик расстояния //сайт // подключение библиотек для работы с дисплеем Nokia #include #include // Nokia 5110 // pin 3 - Serial clock out (SCLK) // pin 4 - Serial data out (DIN) // pin 5 - Data/Command select (D/C) // pin 6 - LCD chip select (CS) // pin 7 - LCD reset (RST) Adafruit_PCD8544 display = Adafruit_PCD8544(3, 4, 5, 6, 7); // аналоговый пин для подключения выхода Vo сенсора const int IRpin = A0; // переменные int value1; // для хранения аналогового значения unsigned long timevisitors; // время прохождения int count_visitors=0; // переменная подсчета посетителей void setup() { // запуск последовательного порта Serial.begin(9600); Serial.println("start"); // инициализация дисплея display.begin(); // установить контраст фона экрана display.setContrast(60); display.clearDisplay(); // очистить экран display.setTextSize(1); // размер шрифта display.setTextColor(BLACK); // цвет // заставка display.setCursor(5,15); display.print("Visitors: 0"); display.display(); delay(2000); } void loop() { // получаем сглаженное значение и переводим в напряжение value1=irRead(); if(value1>50) // фиксация прохождения { timevisitors=millis(); while(irRead()>50) ; if(millis()-timevisitors>300) // > минимального времени прохождения { Serial.println("passage!!!"); count_visitors=count_visitors+1; // увеличение счетчика // вывод в монитор последовательного порта Serial.print("count_visitors="); Serial.println(count_visitors); // вывод на дисплей display.clearDisplay(); display.setCursor(5,15); display.print("Visitors: "); display.print(count_visitors); display.display(); } } delay(200); } // Усреднение нескольких значений для сглаживания int irRead() { int averaging = 0; // переменная для суммирования данных // Получение 5 значений for (int i=0; i<5; i++) { value1 = analogRead(IRpin); // значение сенсора переводим в напряжение float volts = analogRead(IRpin)*0.0048828125; // и в расстояние в см int distance=32*pow(volts,-1.10); averaging = averaging + distance; delay(55); // Ожидание 55 ms перед каждым чтением } value1 = averaging / 5; // усреднить значения return(value1); } Работать с сенсорами SHARP очень просто - достаточно подключить к нему питание и завести вывод Vo на аналоговый вход Arduino. Значение получаемой функции analogRead представляет собой целое число от 0 до 1023. Таким образом, чтобы узнать напряжение на выходе сенсора, необходимо значение на аналоговом входе Arduino умножить на 0,0048828125 (5 В / 1024). Расстояние вычисляем по формуле distance=volts*0.0001831-0.003097. При чтении данных, при каждой итерации цикла, иногда приходят разные значения сигнала при одном и том же расстоянии. Датчик передает сигнал на аналоговый порт с некоторой амплитудой и иногда в момент считывания данных значение оказывалось отличным от нормального, потому что итерация приходится на провал. Для сглаживания значений, получаемых с дальномера используем функцию irRead(). Датчик обнаруживает попадание объекта в дверной проем. Далее ожидаем окончания прохода. Если это время больше минимального времени прохода (отсечение взмаха руки, пролет предмета и пр.) инкрементируем счетчик посетителей и выводим данные в последовательный порт и на дисплей. Для работы с дисплеем Nokia 5110 нам понадобятся Arduino библиотеки Adafruit_GFX и Adafruit_PCD8544.


Часто задаваемые вопросы FAQ
1. На дисплей не выводится информация- Проверьте правильность соединения всех проводов, согласно схеме на рисунке 5.
- Проверьте подсоединение модуля sharp;
- Проверьте срабатывание обнаружения датчиком в мониторе последовательного порта.